
Moboti-W-HV

Moboti-Ch-XT - Mobile Robot
Moboti è il primo prototipo di robot, progettato Bauman appositamente per l'eliminazione dell'incidente di Chernobyl.
Il robot era attrezzato per la pulizia del tetto della centrale nucleare di Chernobyl, e per lo svolgimento di indagini sulle radiazioni.
Il primo robot si chiamava - Moboti-B-XT. Nome abbreviato per significare robot mobile, la lettera “H” identifica l'incidente di Chernobyl, e HV la sua possibilità di operare in ambienti chimici:
I progettisti di Moboti-Ch-HV furono Shvedov, VN, Dorothy V., AV Kalinin, MR Chumakov.
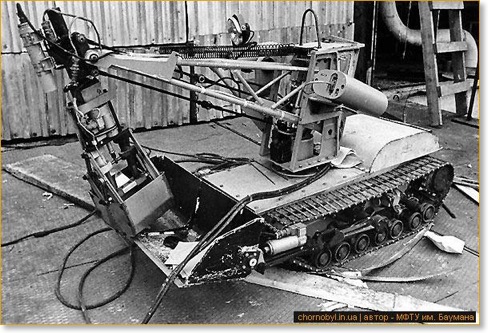
Foto - Moboti-H-HV Chernobyl (foto Kurchatov Institute ") 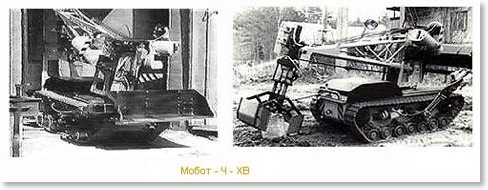
Le caratteristiche principali del robot Moboti-Ch-HV sono:
- peso totale del robot :430 kg
- telaio snodato Moboti
- cavo di alimentazione (lunghezza 200 metri).
Grazie alle sue dimensioni ridotte e alla sua elevata manovrabilità e mobilità, Moboti-CH-XT ha fornito una buona prestazione durante l'eliminazione dell'incidente.
Ha lavorato per circa 1000 ore e contribuito alla “pulizia” di più di 11.000 metri quadrati di superficie.
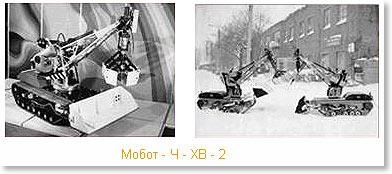
Moboti-H-HV-2
La seconda generazione Moboti
L'anno successivo, nella primavera del 1987, i progettisti hanno preparato un secondo, più avanzato, modello di robot.
È stata chiamata Moboti-H-HV-2.
Alla centrale nucleare di Chernobyl furono consegnato due copie di Moboti-H-HV-2.
I robot sono stati usati per pulire il tetto dai materiali radioattivi abbandonati durante l'esplosione del reattore.
Oltre alla decontaminazione del tetto i robot vennero utilizzati per eseguire lavori sul tetto di cemento della centrale nucleare di Chernobyl. Moboti-H-HV-2 di dimostrò capace di eseguire l'intero ciclo di lavoro, cominciando dalla pulizia (decontaminazione) per arrivare alla preparazione per la cementificazione del tetto senza coinvolgere lavoro umano.
Secondo alcune fonti Moboti-H-HV-2 è stato utilizzato nel giugno 1987 per eseguire lavori nella sala macchine della centrale.
Robot TDB-1
Con la sigla TDB si identificano i robot utilizzati in operazioni di rimozione e trasporto detriti. Il lavoro svolto da questi mezzi in condizioni ambientali proibitive fu determinante. Altrettanto determinante fu il loro concetto costruttivo, flessibile a seconda degli impieghi e le caratteristiche di leggerezza per operare in situazioni logistiche particolari (tetto della centrale) e di mobilità.
Questi robot furono progettati per lavorare in condizioni ambientali pari ad 3000 roentgen di raggi gamma per ora, ma furono in grado di portare a termine missioni in condizioni particolari con livelli di raggi gamma pari a 10000 roentgen per ora.
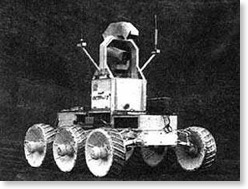
Per il loro sviluppo si fece riferimento al veicolo progettato per l’esplorazione lunare, programma Lunokhod-1 del 1970, e Lunokhod-2 del 1973 da un team di ingegneri guidati da Alexander Leonovich Kemurdzhiana. Questo concetto costruttivo, basato su ruote motrici indipendenti alimentate a batteria si dimostrò fondamentale per operare a Chernobyl.
Secondo alcune fonti si calcola che la quantità di lavoro svolto da queste macchine fu paragonabile a quello di un migliaio di operai, secondo altre fu trascurabile.
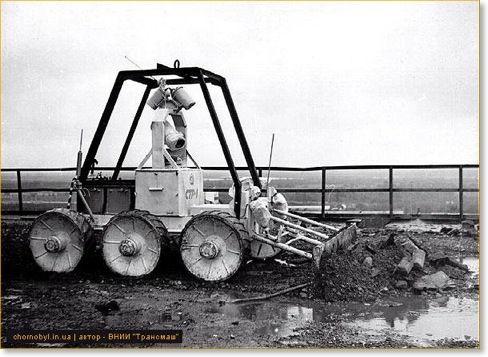
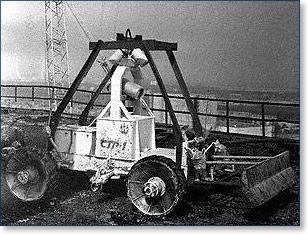
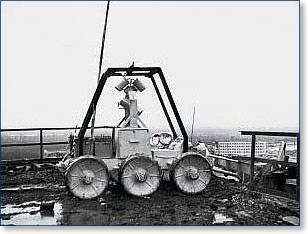
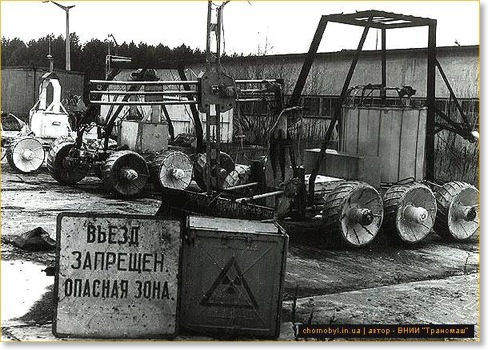
Foto: robot di trasporto specializzato al lavoro sul tetto della centrale di Chernobyl 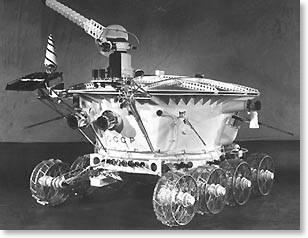
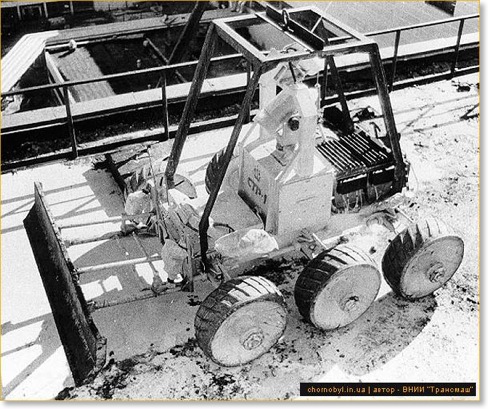
Robot STR-1 nella parte superiore di Chernobyl (blocco B)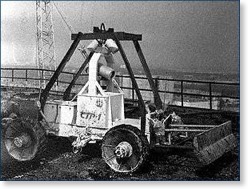
Specifiche robot:
- peso totale del robot - 1100 kg
- Velocità - fino a 1 kmh
- Alimentazione a due batterie zinco-argento
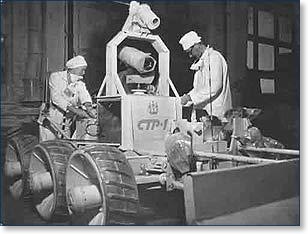
Il robot ha tre componenti principali, che, per inciso, sono stati sviluppati in modo indipendente da produttori diversi:
- Complesso radio e comandi - IFTP e altre Istutuzioni
- Telaio e organi semoventi - Sviluppato nell’Istituto di ricerca Transmash
- Body Work - meccanismi e attrezzature di lavoro. Sviluppato da istituto di ricerca delle centrali nucleari
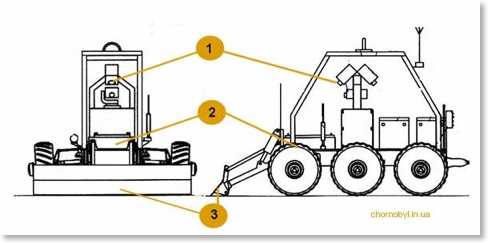
Il telaio e le parti del robot sono costituite da leghe di metalli leggeri (titanio).
La visualizzazione della zona circostante e di lavoro viene stata effettuata con l'ausilio di telecamere installate,quindi attraverso lo stesso robot, e su torri installate sul luogo di lavoro (sul tetto di Cernobyl, nei pressi del BT-2, ecc.)
Nelle pubblicazioni a volte viene nominato come "Clean-2".
Questo nome è stato dato dal costruttore VNII Transmash che simultaneamente al CTP-1 ha sviluppato sistemi robotici complessI e pesanti, i Klin-1 ".
Controllo del robot: a mezzo canali radio per semplificare notevolmente l'utilizzo del robot sul tetto della centrale nucleare di Chernobyl.
Non c'era alcun comando a mezzo cavi, che avrebbero ridotto la manovrabilità del robot.
Secondo informazioni esistenti, un robot utilizzato per studiare il reattore è stato perso, impigliato nell’interno della centrale e non potè essere recuperato. Il robot è ora in uno dei locali del sarcofago di Chernobyl.
Anche se l'alimentazione autonoma presenta alcuni svantaggi (Le batterie hanno una autonomia limitata, e il lavoro nelle aree con alta radiazione di fondo ha portato a rapidi decadimenti), la manovrabilità si è sempre dimostrata ottima.
Per la messa in opera dei robot di trasporto specializzato nella centrale nucleare di Chernobyl nel 1986 fu realizzata una culla speciale per la movimentazione del robot sul posto di lavoro tramite elicottero Mi-8 oppure una gru “Libeher”.
Fu inoltre sviluppata una speciale attrezzatura tecnologica per la decontaminazione delle ruote, che è stata anche inserito nel complesso robotico.
Le notizie sul lavoro svolto da questa macchine sono contraddittorie. Secondo alcuni le performance del TDB-1 non furono elevate, il robot operò per non più di 10 ore, pulendo circa 20 metri quadrati del tetto. Secondo altre fonti il TDB-1 ha permesso di pulire il tetto di Chernobyl da 90 tonnellate di materiali ad alto livello di contaminazione, permettendo una riduzione dei livelli di radiazione di fondo di 20 volte.
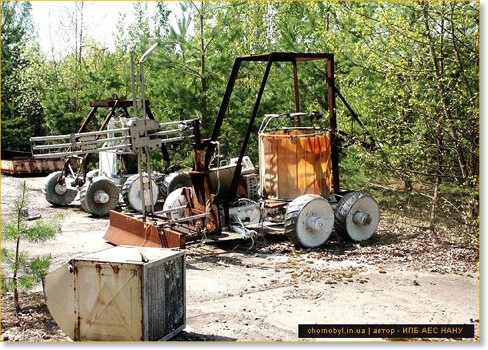
stoccaggio - STR-1 on-site 20 anni dopo l'incidente
